|
|
|
Our Tech Examples Applications FAQ Index Sales
|
|
Upcoming and Past Presentations |
Robert K. McConnell, PhD
WAY-2C
|
|
Spectral "cubes" contain images from many different spectral bands each showing the same scene. Their advantage is often presented as increased accuracy based on the ability to match to an entire spectrum at each pixel. Little attention may be paid to which bands contain the information most relevant for distinguishing the classes of interest. In contrast, experience shows that best results are usually obtained when bands with the most relevant information for the classes to be differentiated are weighted most heavily. Neural net methods are currently popular for automated supervised training and identification from such large data sets with many independent attributes. These methods generally require substantial skill and computational investment, often with little understanding of the reasons for, or assurance of, success. There is, however, a new method that can often both determine an optimum data subset for identification, and perform the identification more efficiently and deterministically. The new method, based on information theory, will be illustrated using well-known hyperspectral images. It will be shown how, when there are only a few classes of interest, once the classes have been specified, a data subset consisting of three or fewer spectral bands is often adequate to reliably differentiate those classes. The result can be a dramatic reduction in the transmission, storage and computational bandwidth requirements for robust identification. |
|
|
The Vision Conference April 10-12, 2018 Hynes Convention Center Boston, Massachusetts, USA |
Robert K. McConnell, PhD
WAY-2C
|
|
Whether signage detection in a scene or potential customer detection in big data, efficient object detection begins with classification of objects based on selection of relevant attributes and their weights. Neural net methods are currently popular for automated supervised training and classification from large data sets with many independent attributes. These methods generally require substantial skill and computational investment, often with little understanding of the reasons for, or assurance of, success. There is, however, at least one alternative method that can often efficiently determine an optimum data subset for classification, provide an estimate of success rate, and perform the actual classification. The method, based on information theory, will be described and illustrated using well-known hyperspectral images. It will be shown how, when there are only a few classes of interest, once the classes have been specified, a data subset consisting of three or fewer attributes (e.g. spectral bands) is often adequate to reliably differentiate those classes. The result can be a dramatic reduction in the transmission, storage and computational bandwidth requirements for robust classification and object of interest detection. |

|
|
"Object Detection" Tuesday, September 5, 2017 6:00 PM to 8:00 PM Microsoft NERD Center - Horace Mann Room 1 Memorial Drive , Cambridge 02142, MA Slide Archive PDF |

Robert K. McConnell, PhD
WAY-2C Color Machine Vision

|
In vision systems, image processing techniques can be used for color measurement, color matching, and color-based identification. As each of these has different requirements, success demands different tools. Too often, the tools and methods that work well for one application are applied to another with disappointing results. Color, and color-like (sometimes called false-color), vision system usage is expanding beyond simple factory applications and into areas such as robotics of many types, vehicle navigation, agriculture, security, etc. There it may be called upon to quickly learn to reliably identify items of complex color and/or shape. In a free webcast on May 17, Dr. Robert McConnell, President of WAY-2C will provide detailed information on color theory, the types of methods that can be used, and how successful robust, automated identification of complex items can be accomplished using tools based on probability and information theory. The presentation will be followed by a question and answer period, so bring your color-based identification questions to the table! |

|
|
Wednesday, May 17, 2017, 11:00 AM EDT 10:00 AM CDT 8:00 AM PDT 3:00 PM GMT Archived Presentation |
Robert K. McConnell, PhD
WAY-2C
 
|
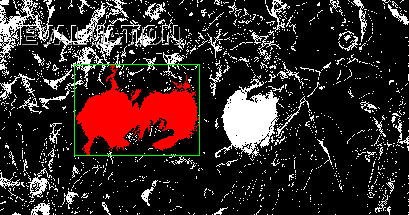
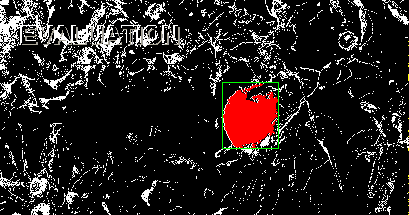
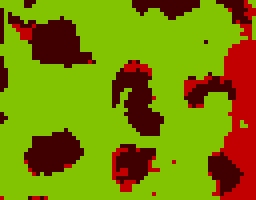
Identification of the subset of image data most relevant for differentiation and identification of the specific classes of interest becomes particularly important as automated imaging systems may be called upon to operate in uncontrolled lighting conditions typical of AgTech and other areas where spectra of those classes may change with time. In recent years much research has focused on information theoretic approaches involving mutual information between class and data to find the most relevant data subset. The problem has been to maximize that mutual information while minimizing redundant information among the data bands selected. We describe and illustrate a new method that can quickly and efficiently accomplish this objective. When modest numbers of classes must be differentiated, a combination of three or fewer spectral bands can often be found that will provide enough contrast for robust non-parametric maximum likelihood identification. The method provides a numerical estimate of accuracy and has been demonstrated to yield good interpretation results for multispectral and hyperspectral images as well as a variety of non-image time-series data. With an eye towards use in automated harvesting applications, we illustrate the method using several hyperspectral image sets including simulated apple orchard images. |
  |
|
Wednesday, October 12, 13:30 – 14:40 Hyperspectral Imaging & Applications Conference Oct 12th & 13th, 2016 Ricoh Arena Coventry, UK |
Robert K. McConnell, PhD
WAY-2C Color Machine Vision

|
Humans and many other creatures rely on color for identification tasks of classification, verification and anomaly detection. In general, objects of interest are characterized by complex multicolor distributions. In machine vision systems, image processing methods can be used for color measurement, color matching, and color-based identification. Each has different requirements and success demands different tools. Too often tools and methods that work well for one operation are applied to another with disappointing results. In this webcast, Dr. Robert McConnell, President of WAY-2C will discuss color theory, the types of methods that can be used and how successful automated identification of such objects can be accomplished using tools based on probability and information theory. |
|
|
Tuesday, November 3, 2015, 11:00 AM EST 10:00 AM CST 8:00 AM PST 4:00 PM GMT |
Robert K. McConnell, PhD
WAY-2C Color Machine Vision

|
The presentation will demonstrate the advantages of complex attribute distributions for recognition and segmentation. Using examples from color, multispectral and hyperspectral imagery it will first show the basics of a general integrated approach to classification, verification and anomaly detection based on such attributes and then describe a new, closely related, method for selection of an optimum subset of the available attributes. View full abstract |

|
|
Tuesday, April 14 10, 2015, Doors Open: 6:00 PM. Presentation: 6:30 PM. Dinner: 8:00 PM. Olin College, 1000 Olin Way, Needham, MA 02492, Milas Hall Auditorium. The meeting is free and open to the public. Reservations are not required. An unhosted dinner with the speaker follows the meeting at Bertucci's, 1257 Highland Ave., Needham, MA 02492.
|
Robert K. McConnell, PhD
WAY-2C Color Machine Vision
|
The number of items that can be reliably differentiated increases rapidly with the number of distinct colors present in each item. Limits can be easily estimated using basic math. Machine vision can often use such color information for fast, reliable, orientation-independent identification for operations like sorting or detection of defective or rogue items. A modern maximum likelihood method, different than that normally taught in color machine vision courses and literature, allows extremely rapid training and retraining. It simplifies efficient, robust and flexible identification based on, even complex, color combinations. |
|
|
Tuesday, April 15, 2014, 10:00 a.m. to 10:45 a.m. The Vision Conference April 15-17, 2014 Hynes Convention Center Boston, Massachusetts, USA |
Robert K. McConnell, PhD
WAY-2C Color Machine Vision
PDAD Special Session: Mapping with Hyperspectral Imagery
ASPRS 2014 Annual Conference,
March 23-27, 2014
Galt House Hotel
Louisville, Kentucky, USA
Robert K. McConnell, PhD
WAY-2C Color Machine Vision
Tuesday, April 30, 2013 1:10 PM - 3:10 PM
.
Session 7: Spectral Data Analysis Methodologies II
Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XIX
SPIE Defense, Security, and Sensing
29 April - 3 May 2013
Baltimore Convention Center
Baltimore, Maryland, USA
Hyperspectral and Multispectral Data
When Time, Bandwidth and/or Computing Power are Limited
Robert K. McConnell, PhD
WAY-2C Color Machine Vision
Thursday, June 14, 2012 15:30-16:50
Session 8-4: Data Management
June 11-14, 2012 Ottawa, Canada
Optimizing Interpretation Efficiency of
Hyperspectral, Multispectral, and Other Data
When Time, Bandwidth and/or Computing Power is Limited.
Robert K. McConnell, PhD
WAY-2C Color Machine Vision

|
In recent years, much effort has been devoted to developing methods to reduce
the amount of data that must be maintained for adequate interpretation of
hyperspectral images. We describe and demonstrate a new supervised information
theoretic approach that can quickly and efficiently locate the most relevant
data to differentiate a specified set of classes. This usually makes it possible
to greatly reduce transmission and/or storage bandwidth requirements, eliminate
the need for most or all manual data editing, provide a numerical estimate of
accuracy and speed data interpretation. The method has been demonstrated to give
good interpretation results for multispectral and hyperspectral images as well
as non-image time-series data. |
|
Demonstration: Tuesday, April 12, 2011.
2011 IEEE International Conference on Technologies for Practical Robot Applications
April 11-12, 2011
Holiday Inn Select Hotel, Woburn MA (Greater Boston) USA
Why They're Different, and Why It Matters
Robert K. McConnell, PhD
WAY-2C Color Machine Vision
| Except in special cases, the algorithmic requirements of color-based recognition and color measurement are fundamentally different. For these special cases software designed for one type of application may be used with some effort to handle the simplest applications of the other type. More generally, failure to properly distinguish the two regularly results in overlooked inspection automation opportunities, unnecessary costs, and/or disappointing system performance. Examples will be discussed along with factors critical for success. |
2010 Quality Measurement Conference
March 22-25, 2010
Marriott World Center, Orlando, FL
Recent Developments in an Off-the-Shelf System for
Robust Color and Multispectral Based Recognition and Robot Control.
Robert K. McConnell, PhD
WAY-2C Color Machine Vision
|
|
Two examples are shown and demonstrated of the use of WAY-2C to provide robust segmentation and blob analysis in the presence of real-world complexities. Recent enhancements to the system to increase the amount of information available for decision making are discussed as well as robot control interfaces. |
|
Tuesday, November 10, 2009, -Robot Demonstrations
2009 IEEE International Conference on Technologies for Practical Robot Applications
November 9 - 10, 2009
Holiday Inn Select Hotel, Woburn MA (Greater Boston) USA
PACK EXPO INTERNATIONAL
Many saw WAY-2C operating on the new Sony Color Intelligent Cameras
at the Sony Visual Imaging Products exhibit:
(Booth Number: E-7236) November 9-13, 2008,
McCormick Place, Chicago, IL
Robert K. McConnell, PhD
WAY-2C Color Machine Vision
Mobile robots typically operate in environments where objects of interest are likely to appear as mixtures of colors and textures with complex outlines. To use color or multispectral imagery for identification and decision making, systems that can be trained by example to recognize such objects have distinct advantages.

|
WAY-2C is a system for color-based recognition that relies on a non-parametric statistical model. It is quickly trained by example and provides robust classifications in the presence of real-world complexities. A system combining WAY-2C with a smart camera and a simple interface to robot control routines will be described and demonstrated.
|
|
Tuesday, November 11, 2008, 3:30 - 5:00 PM -Robot Demonstrations
2008 IEEE International Conference on Technologies for Practical Robot Applications
November 10 - 11, 2008
Holiday Inn Select Hotel, Woburn MA (Greater Boston) USA
Ken W. White, CMfgE
Visual*Sense*Systems
Robert K. McConnell, PhD
WAY-2C Color Machine Vision

|
Some traditional B&W applications are just plain easier with trainable color recognition! Old proven assumptions for gray scale inspection often limit our thinking when new applications arise. Color techniques provide robust recognition when trained on objects of interest. The lack of background is a powerful, contrarian approach for object detection! Color and grayscale modalities will be compared, lighting geometry, part spectrum and part texture will be discussed and typical results shown. |

|
|
Thursday, June 14, 2007, 8:00 a.m. to 10:00 a.m. International Robots & Vision Conference, June 12-14, 2007 Donald E. Stephens Convention Center Rosemont (Chicago), Illinois, USA
|
Ken W. White, CMfgE
Visual*Sense*Systems
Robert K. McConnell, PhD
WAY-2C Color Machine Vision
|
Color based vision is challenging, with actual color a major variable. Old proven assumptions for gray scale inspection don't always apply. The evolution of color is compared with earlier gray scale inspection. Simplification techniques for both color and gray scale modalities will be discussed, including illumination spectrum, lighting geometry, part texture plus color space algorithm capabilities. Examples of successful applications plus demos will offer a new approach for color vision. |
|
|
Thursday, May 11, 2006, 8:00 a.m. to 10:00 a.m. The Vision Show East May 9-11, 2006 Hynes Convention Center Boston, Massachusetts, USA
|

|
Many people familiar with machine vision equate color machine vision with location, identification, and/or inspection of objects or scenes with simple color distributions, simple boundaries, and simple backgrounds. Few real applications meet these criteria. The speaker will discuss and demonstrate an unconventional color machine vision and image interpretation system which handles complex color distributions, complex boundaries, and complex backgrounds and has been successfully deployed in a variety of challenging real-world problems. |

|
|
Tuesday, October 12, 2004, Informal Discussion: 6:00 PM. Program: 6:30 PM. Wellesley High School, Wellesley MA . The meeting is free and open to the public. Reservations are not required. An optional dinner with the speaker follows the meeting, at a local restaurant.
|
Assembly Tech Expo 2001: Donald E. Stephens Convention Center, Rosemont, IL, October 1-3, 2001.
See also http://www.assemblymag.com.
Color vision can be an important tool in verifying the presence of the correct components in assemblies. Components in these assemblies are more often than not multicolored. Examples range from automotive fuses and interior fabrics to electronic components, food, and pharmaceutical packaging. Complex coloration is easily processed by humans and other living creatures but has presented serious obstacles to traditional machine vision methods. A new approach overcomes these problems and allows true training by example without the necessity of color space transformations, threshold setting, or other operations requiring special technical knowledge or judgement.
The Vision Conference East: Hynes Convention Center, Boston, MA, April 4-6, 2000
![]() Automotive fuse blocks provide a classic model for color-based assembly inspection. Lessons learned from such inspection are readily applicable to other color-based inspection systems.
Since most modern automotive fuses are color-coded to facilitate human recognition, color machine vision provides an obvious method to automate verification of correct placement. Unfortunately, the efforts of some very competent machine vision engineers, relying on widely published, apparently rational, approaches to color image interpretation, have resulted in inspection systems which are tedious to train and disappointing in their performance. Results have been the undeserved tarnishing of the reputations of the engineers involved and color machine vision in general.
Well-intended design changes by fuse manufacturers, rather than improving the situation, may have exacerbated it.
Some of the problems are attributable to poor choice of cameras and lighting. However the major reasons for the difficulties, and the seeds of the solution, were recognized by mathematicians centuries ago. Recent mathematical advances have made it easier to quantify the exact nature of the problem and the surprisingly simple solution. Unfortunately authors of textbooks and machine vision product literature generally appear to be unaware of both the problems and the solutions.
A variety of fuse blocks are used to illustrate both the problems and the successful solutions.
Automotive fuse blocks provide a classic model for color-based assembly inspection. Lessons learned from such inspection are readily applicable to other color-based inspection systems.
Since most modern automotive fuses are color-coded to facilitate human recognition, color machine vision provides an obvious method to automate verification of correct placement. Unfortunately, the efforts of some very competent machine vision engineers, relying on widely published, apparently rational, approaches to color image interpretation, have resulted in inspection systems which are tedious to train and disappointing in their performance. Results have been the undeserved tarnishing of the reputations of the engineers involved and color machine vision in general.
Well-intended design changes by fuse manufacturers, rather than improving the situation, may have exacerbated it.
Some of the problems are attributable to poor choice of cameras and lighting. However the major reasons for the difficulties, and the seeds of the solution, were recognized by mathematicians centuries ago. Recent mathematical advances have made it easier to quantify the exact nature of the problem and the surprisingly simple solution. Unfortunately authors of textbooks and machine vision product literature generally appear to be unaware of both the problems and the solutions.
A variety of fuse blocks are used to illustrate both the problems and the successful solutions.
The Vision Conference: San Jose, CA, October 4-7, 1999
|
|
We explore some myths, fables, and realities of automated color based recognition as exemplified by a legendary problem in fabric identification. In particular we are concerned with answering the question, "Can traditional color machine vision methods provide more trustworthy results than the emperor's dishonest advisors?". The results may surprise you. |
Applied Machine Vision '99: Hynes Convention Center Boston, MA , September 21-22, 1999
Co-located with Electronic Imaging International, Photonics East, and New England Design and Manfacturing Expo.
Last Updated 10/24/18